Indoor Robotics (Continental)
Alexa Modular Adapter
Alexa Enabled Universal Remote
ARbot
AutoIrrigation
Automated Hydroponics
Autonomous UV-C Sanitation Bot
Bus Tracker Project
Bus Tracking System
Bus Usage Monitor
Classmates Search
Cloud Native Wireguard
CO2 Monitoring System
Diabetics Companion
Edu Plastic Pollution
EDU (CPU)
Googun
H2Eyes
IMDB on FPGA
Indoor Robot
Induction Motor
Land Trust Management
Learning Storage Networks
Low Latency Gaming
Marine Plastics Monitor
ODS Web App Performance Tuning
Offroad Spotting Drone
ONI Code Visualization
Painless Healthcare Management
Parquet+OCI project
Preventing Vehicular Heatstroke
Remote Nuclear Monitoring
Rent-a-Driveway 2020
ResearchConnect
RREESS Microgrid Management
Save our Species 2020
SAWbots - Miniature Medical Robots
Self Stabilizing Personal Assistance Robot
Slug Charge
Slug Sat
Smart Cane
Smart Magazine Floorplate
Smart Park
Smart Seat Cover for Posture Detection
Smart Slug Bin
Soaring Slugs
Team Litter Buster
Understanding Healthcare Data
Vibrace
VoIP Management Assistant
Wildfire Detection Drone
Abstract
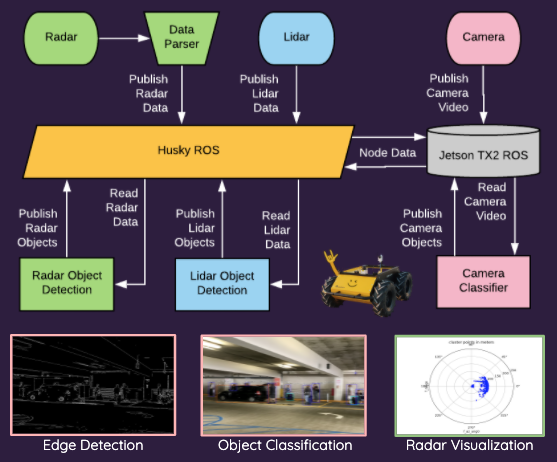
We experimented with a fusion of automotive lidar, radar, and camera sensors in order to evaluate their potential for indoor use. These sensors are integrated with a Husky UGV robot; this setup allows us to collect data for tasks such as object detection & classification. We then evaluate the accuracy of our results by comparing our finalized object classifications to the actual environment.
Approach
Data from our sensors is transferred to our middleware, ROS (Robot Operating System), located both on the Husky and the Jetson TX2, an external AI-computing device. ROS consolidates our sensor data for processing multiple data streams simultaneously. Each of the sensors publishes it’s data to ROS through executables called nodes, which follow a publisher-subscriber pattern. We then perform radar-lidar object detection and live video classification, with the results published back to ROS. Ultimately, we’re combining the data to map object labels to a 3D model of the environment within ROS. We can then determine the accuracy of the model by comparing it to the actual environment.
Overview
Continental is an automotive parts manufacturing company with a variety of sensors suited for tasks such as collision detection and adaptive cruise control. With an expanding robotics market, Continental is interested in marketing these same devices for use in indoor environments. Our goal is to analyze the performance of Continental sensors, in indoor settings, and determine the best combination of their sensors for indoor robotics use.
Challenges
e began with the pretense of having physical access to the hardware. However, we faced many setbacks in acquiring and accessing the hardware, including legal delays for on-campus hardware access, and and campus closure due to COVID-19. Each new setback changed our workflow, shifted our goals, and reset our progress. We only managed partial hardware access towards the project’s end. In response, we shifted focus to our data processing methods.
Conclusion
We were able to accomplish a variety of processing methods. For the camera, we implemented live video edge detection and object classification. In addition, we achieved video data streaming within ROS, which we can apply these processes to. For radar, we were able to parse the raw data directly from our radar sensor, produce a 2D visualization of the data, and detect objects. For lidar, we implemented 2D mapping within a simulated environment.
Given more time, we would integrate all of our processes into a single ROS-centered system, and produce a full 3D visualization of our processed data within ROS. Upgrading to the most recent ROS release would simplify the integration of our Python 3 code with our overall system.
Special thanks to
Shuhei Takahashi, Josh Frankfurth,
Jolton Dsouza & Rob Tucker of Continental,
Our professor Richard Jullig,
Our TAs Chandraniel & Arindam,
And Veronica Hovanessian!