Self-Stabilizing Assistive Robot
Alexa Modular Adapter
Alexa Enabled Universal Remote
ARbot
AutoIrrigation
Automated Hydroponics
Autonomous UV-C Sanitation Bot
Bus Tracker Project
Bus Tracking System
Bus Usage Monitor
Classmates Search
Cloud Native Wireguard
CO2 Monitoring System
Diabetics Companion
Edu Plastic Pollution
EDU (CPU)
Googun
H2Eyes
IMDB on FPGA
Indoor Robot
Induction Motor
Land Trust Management
Learning Storage Networks
Low Latency Gaming
Marine Plastics Monitor
ODS Web App Performance Tuning
Offroad Spotting Drone
ONI Code Visualization
Painless Healthcare Management
Parquet+OCI project
Preventing Vehicular Heatstroke
Remote Nuclear Monitoring
Rent-a-Driveway 2020
ResearchConnect
RREESS Microgrid Management
Save our Species 2020
SAWbots - Miniature Medical Robots
Self Stabilizing Personal Assistance Robot
Slug Charge
Slug Sat
Smart Cane
Smart Magazine Floorplate
Smart Park
Smart Seat Cover for Posture Detection
Smart Slug Bin
Soaring Slugs
Team Litter Buster
Understanding Healthcare Data
Vibrace
VoIP Management Assistant
Wildfire Detection Drone
Objective
Elderly and disabled persons have difficulty carrying personal items. To alleviate this issue, our goal is to design an assistive robot with autonomous tracking and self-stabilizing capabilities. The design features include:
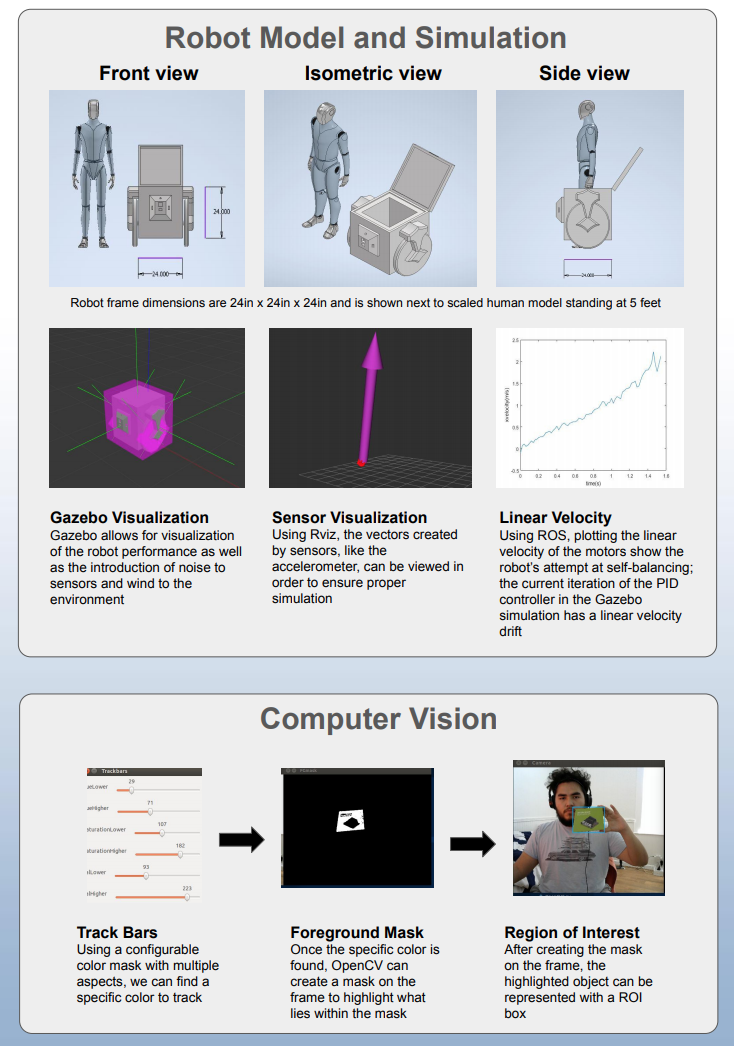
● Two-wheeled rover for easy mobility with a turn radius of 0 degrees
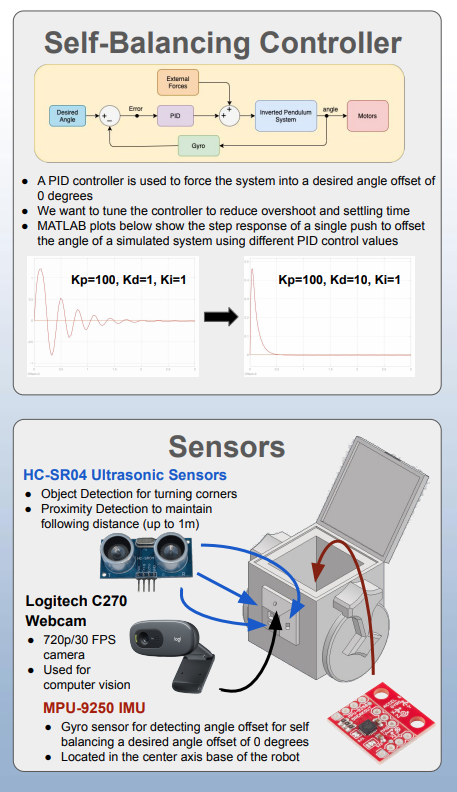
● Self-balancing implemented using a PID controller
● Tracking the user using computer vision with a Jetson Nano
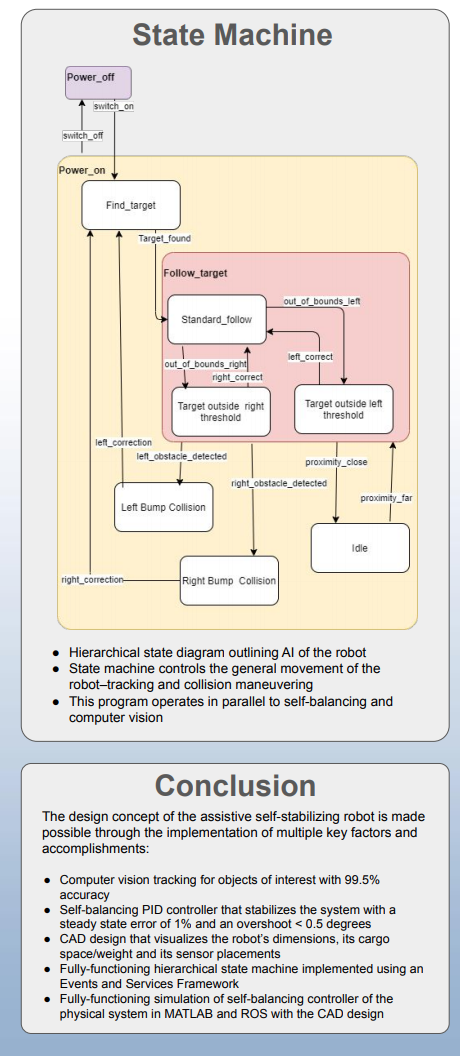
● Raspberry Pi to control the main state machine for robot movement
and to communicate with sensors through GPIO pins
● Simulation of the design provided by ROS and MATLAB