SAWbots: A Platform for Affordable Minimally Invasive Surgeries
Alexa Modular Adapter
Alexa Enabled Universal Remote
ARbot
AutoIrrigation
Automated Hydroponics
Autonomous UV-C Sanitation Bot
Bus Tracker Project
Bus Tracking System
Bus Usage Monitor
Classmates Search
Cloud Native Wireguard
CO2 Monitoring System
Diabetics Companion
Edu Plastic Pollution
EDU (CPU)
Googun
H2Eyes
IMDB on FPGA
Indoor Robot
Induction Motor
Land Trust Management
Learning Storage Networks
Low Latency Gaming
Marine Plastics Monitor
ODS Web App Performance Tuning
Offroad Spotting Drone
ONI Code Visualization
Painless Healthcare Management
Parquet+OCI project
Preventing Vehicular Heatstroke
Remote Nuclear Monitoring
Rent-a-Driveway 2020
ResearchConnect
RREESS Microgrid Management
Save our Species 2020
SAWbots - Miniature Medical Robots
Self Stabilizing Personal Assistance Robot
Slug Charge
Slug Sat
Smart Cane
Smart Magazine Floorplate
Smart Park
Smart Seat Cover for Posture Detection
Smart Slug Bin
Soaring Slugs
Team Litter Buster
Understanding Healthcare Data
Vibrace
VoIP Management Assistant
Wildfire Detection Drone
Abstract
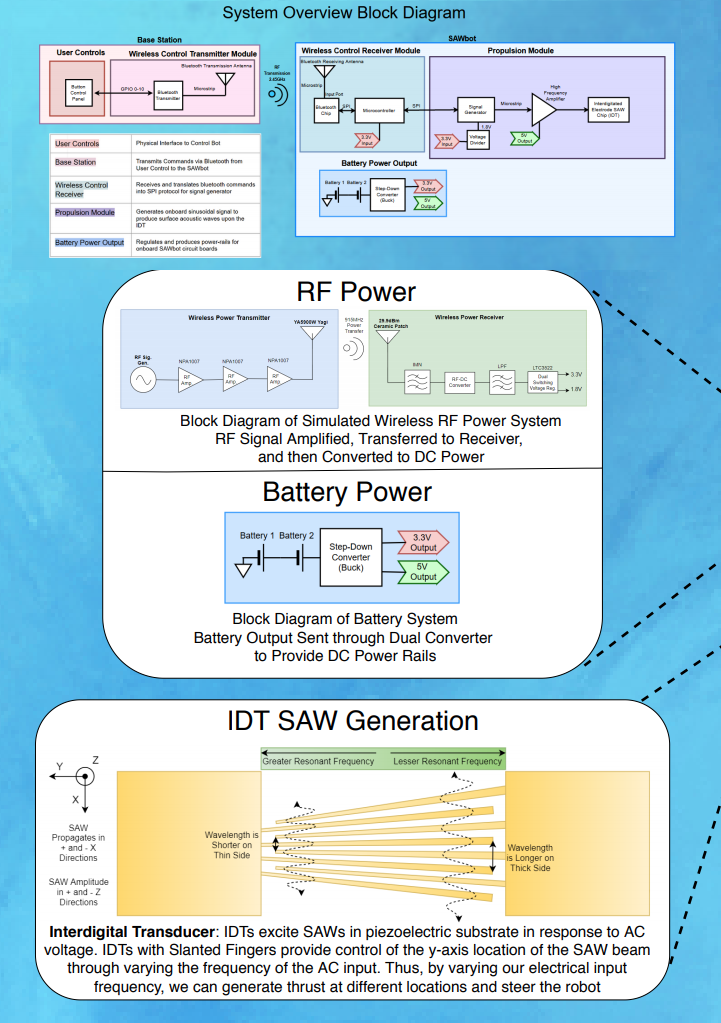
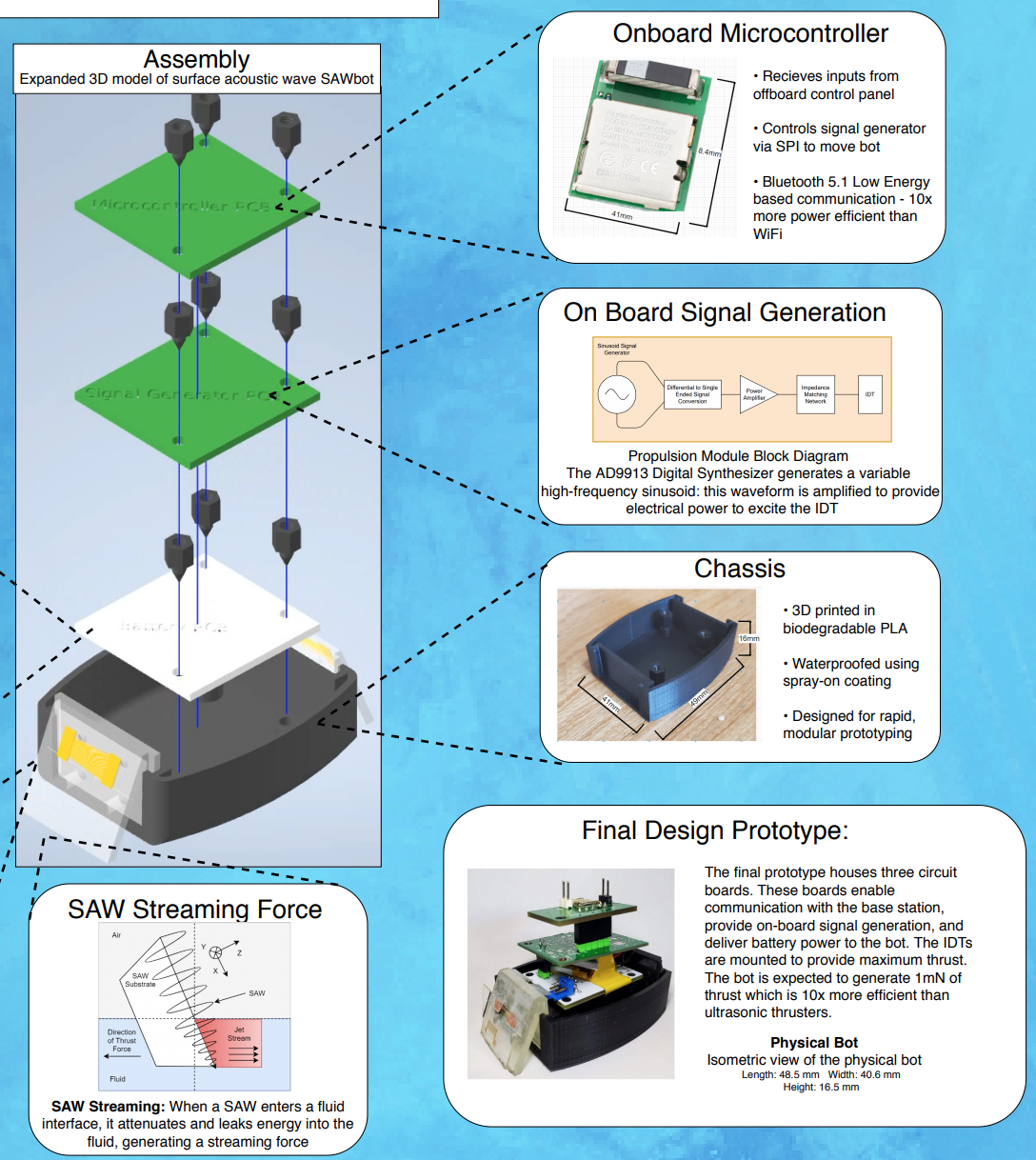
There is currently a lack of minimally invasive procedure (MIP) technology in the medical industry. This type of technology significantly decreases the size and number of incisions needed to operate, which has been shown to improve patient outcomes when compared to traditional surgery. SAWbots provide the optimal solution by providing MIP technology at a decreased cost, thereby making safer surgery more accessible to the medical field. This project improves upon a novel form of propulsion in fluid in compliance with our stakeholder’s requirements. The team used Yanny K. Bourquin and Jonathan M. Cooper’s Swimming Using Surface Acoustic Waves as a starting point for our research and benchmark for our results.
Team
Developed by Dr. Yanik's Research Lab in conjunction with Nic Van Oss, Allie Hunsinger, Phil Canete, Summer Alherz, and Alex Bakaleynik